Chapter 4: Radio Access Network
The high-level description of the RAN in Chapter 2 was mostly silent about the RAN’s internal structure. We now focus on those details, and in doing so, explain how the RAN is being transformed in 5G.
You can think of the RAN as having one main job: to transfer packets between the mobile core and a set of UEs. This means it is deeply involved in the management and scheduling of radio spectrum that we discussed in the last chapter, but there is more to it than that. We start by describing the stages in the RAN’s packet processing pipeline, and then showing how these stages are being disaggregated, distributed, and implemented.
Note that the deconstruction of the RAN presented in this chapter represents a combination of standardized specifications and implementation strategies. The former continues to be under the purview of the 3GPP, but the latter are primarily influenced by a second organization: the Open-RAN Alliance (O-RAN) introduced in Chapter 1. O-RAN is led by network operators with the goal of developing a software-based implementation of the RAN that eliminates vendor lock-in. Such business forces are certainly a factor in where 5G mobile networks are headed, but our goal in this chapter is to identify the technical design decisions involved in that evolution.
4.1 Packet Processing Pipeline
Figure 24 shows the packet processing stages historically bundled in base stations, as specified by the 3GPP standard. Note that the figure depicts the base station as a pipeline (running left-to-right for packets sent to the UE) but it is equally valid to view it as a protocol stack (as is typically done in official 3GPP documents). Also note that (for now) we are agnostic as to how these stages are implemented. Since we are ultimately heading towards a cloud-based implementation, one possible implementation strategy would be a microservice per box.
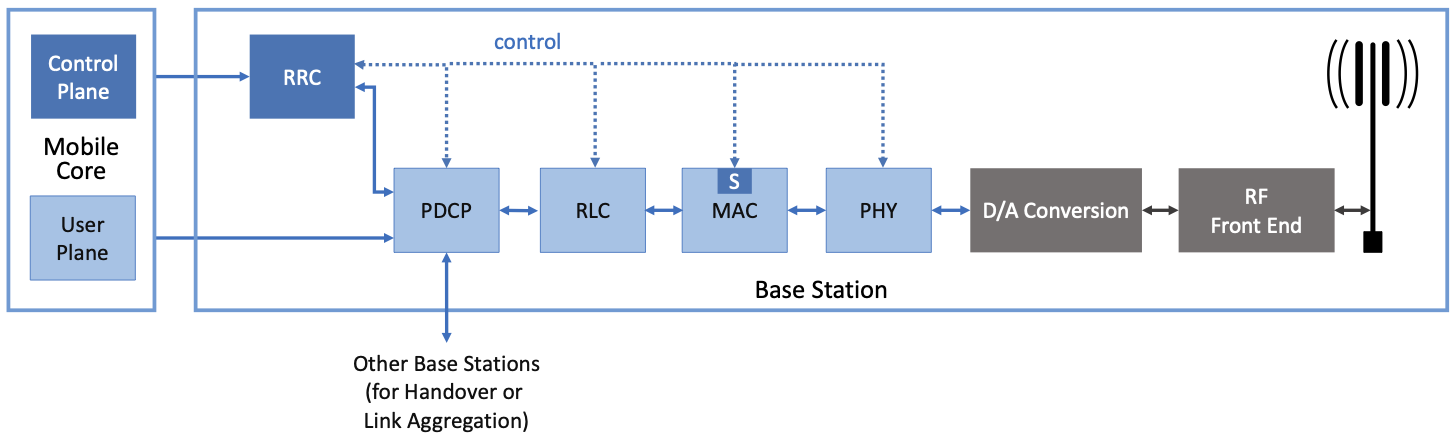
Figure 24. RAN processing pipeline, including both user and control plane components.
The key stages are as follows.
RRC (Radio Resource Control) → Responsible for configuring the coarse-grained and policy-related aspects of the pipeline. The RRC runs in the RAN’s control plane; it does not process packets in the user plane.
PDCP (Packet Data Convergence Protocol) → Responsible for compressing and decompressing IP headers, ciphering and deciphering, integrity protection and integrity verification, duplication, reordering and in-order delivery, and out-of-order delivery.
RLC (Radio Link Control) → Responsible for segmentation and reassembly, as well as reliably transmitting/receiving segments using error correction through ARQ (automatic repeat request).
MAC (Media Access Control) → Responsible for buffering, multiplexing and demultiplexing segments, including all real-time scheduling decisions about what segments are transmitted when. Also able to make a “late” forwarding decision (i.e., to alternative carrier frequencies, including Wi-Fi).
PHY (Physical Layer) → Responsible for coding and modulation (as discussed in Chapter 3), including FEC.
The last two stages in Figure 24 (D/A conversion and the RF front-end) are beyond the scope of this book.
While it is simplest to view the stages in Figure 24 as a pure left-to-right pipeline, the Scheduler described in Section 3.2 (denoted “S” in the figure) runs in the MAC stage/layer, and implements the “main loop” for outbound traffic: It reads data from the upstream RLC and schedules transmissions to the downstream PHY. Since the Scheduler determines the number of bytes to transmit to a given UE during each time period (based on all the factors outlined in Chapter 3), it must request (get) a segment of that length from the upstream queue. In practice, the size of the segment that can be transmitted on behalf of a single UE during a single scheduling interval can range from a few bytes to an entire IP packet.
Also note that a combination of the RRC and PDCP are responsible for the observation made in Section 2.3: that a “base station can be viewed as a specialized forwarder”. The control plane logic that decides whether this base station should continue processing a packet or forward it to another base station runs in the RRC, and the corresponding user plane mechanism that carries out the forwarding decision is implemented in the PDCP. The interface between these two elements is defined by the 3GPP spec, but the decision-making logic is an implementation choice (and historically proprietary). This control logic is generically referred as the Radio Resource Management (RRM), not to be confused with the standards-defined RRC stage depicted in Figure 24.
4.2 Split RAN
The next step is to understand how the functionality outlined above is partitioned between physical elements, and hence, “split” across centralized and distributed locations. The dominant option has historically been “no split,” with the entire pipeline shown in Figure 24 running in the base station. Going forward, the 3GPP standard has been extended to allow for multiple split-points, with the partition shown in Figure 25 being actively pursued by the operator-led O-RAN Alliance. It is the split we adopt throughout the rest of this book. Note that the split between centralized and distributed components mirrors the split made in SDN, with similar motivations. We discuss further how SDN techniques are applied to the RAN below.
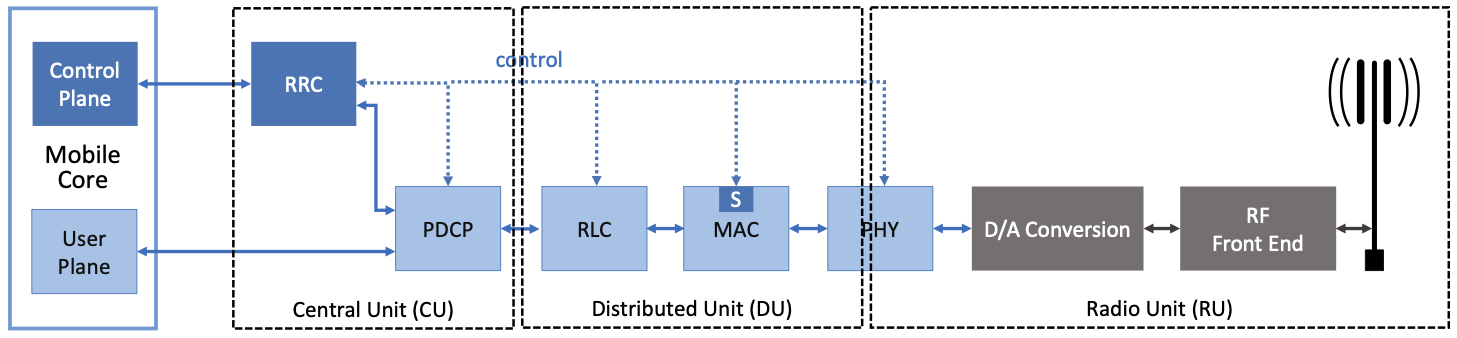
Figure 25. Split RAN processing pipeline distributed across a Central Unit (CU), Distributed Unit (DU), and Radio Unit (RU).
This results in a RAN-wide configuration similar to that shown in Figure 26, where a single Central Unit (CU) running in the cloud serves multiple Distributed Units (DUs), each of which in turn serves multiple Radio Units (RUs). Critically, the RRC (centralized in the CU) is responsible for making only near-real-time configuration and control decisions, while the Scheduler that is part of the MAC stage is responsible for all real-time scheduling decisions.
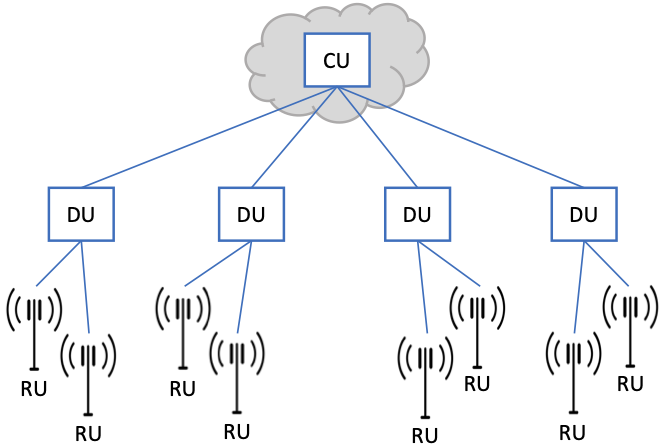
Figure 26. Split RAN hierarchy, with one CU serving multiple DUs, each of which serves multiple RUs.
Because scheduling decisions for radio transmission are made by the MAC layer in real time, a DU needs to be “near” (within 1ms) the RUs it manages. (You can’t afford to make scheduling decisions based on out-of-date channel information.) One familiar configuration is to co-locate a DU and an RU in a cell tower. But when an RU corresponds to a small cell, many of which might be spread across a modestly-sized geographic area (e.g., a mall, campus, or factory), then a single DU would likely service multiple RUs. The use of mmWave in 5G is likely to make this latter configuration all the more common.
Also note that the Split RAN changes the nature of the Backhaul Network, which originally connected the base stations back to the Mobile Core. With the Split RAN there are multiple connections, which are officially labeled as follows.
RU-DU connectivity is called the Fronthaul
DU-CU connectivity is called the Midhaul
CU-Mobile Core connectivity is called the Backhaul
For more insight into design considerations for interconnecting the distributed components of a Split RAN, we recommend the NGMN Alliance Report.
Further Reading
RAN Evolution Project: Backhaul and Fronthaul Evolution. NGMN Alliance Report, March 2015.
One observation about the CU (which becomes relevant in Chapter 6 when we incorporate it into a managed cloud service) is that one might co-locate the CU and Mobile Core in the same cluster, meaning the backhaul is implemented in the cluster switching fabric. In such a configuration, the midhaul then effectively serves the same purpose as the original backhaul, and the fronthaul is constrained by the predictable/low-latency requirements of the MAC stage’s real-time scheduler. This situation is further complicated by the fact that the mobile core itself may be disaggregated, as discussed in Chapter 5.
A second observation about the CU shown in Figure 25 is that it encompasses two functional blocks—the RRC and the PDCP—which lie on the RAN’s control plane and user plane, respectively. This separation is consistent with the idea of CUPS introduced in Chapter 2, and plays an increasingly important role as we dig deeper into how the RAN is implemented. For now, we note that the two parts are sometimes referred to as the CU-CP and CU-UP, respectively.
We conclude our description of the split RAN architecture with the alternative depiction in Figure 27. For completeness, this figure identifies the standardized interfaces between the components (e.g., N2, N3, F1-U, F1-C, and Open Fronthaul). We’re not going to talk about these interfaces, except to note that they exist and there is a corresponding 3GPP specification that spells out the details. Instead, we’re going to comment on the availability of open source implementations for each component.
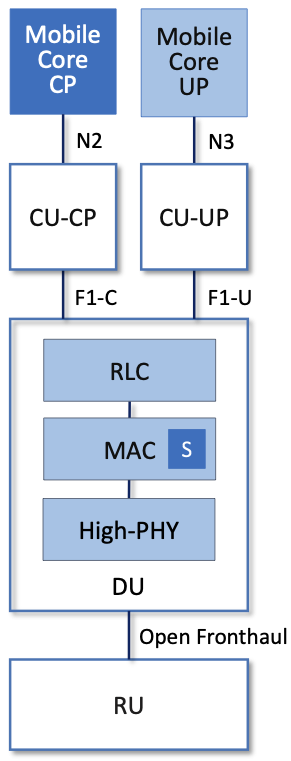
Figure 27. Alternative depiction of the Split RAN components, showing the 3GPP-specified inter-unit interfaces.
With respect to the Central Unit, most of the complexity is in the CU-CP, which, as we’ll see in the next section, is being re-engineered using SDN, with open source solutions available. With respect to the Radio Unit, nearly all the complexity is in D/A conversion and how the resulting analog signal is amplified. Incumbent vendors have significant proprietary know-how in this space, which will almost certainly remain closed.
With respect to the Distributed Unit, the news is mixed, and correspondingly, the figure shows more detail. The High-PHY module—which corresponds to all but the RF modulation step of Figure 17 in Section 3.1—is one of the most complex components in the RAN stack. An open source implementation of the High-PHY, known as FlexRAN, exists and is widely used in commercial products. The only caveat is that the software license restricts usage to Intel processors, although it is also the case that the FlexRAN software exploits Intel-specific hardware capabilities. As for the rest of the DU, the MAC is the other source of high-value closed technology, particularly in how scheduling is done. There is an open source version made available by the Open Air Initiative (OAI), but its usage is restricted to research-only deployments.
4.3 Software-Defined RAN
We now describe how the RAN is being implemented according to SDN principles, resulting in an SD-RAN. The key architectural insight is shown in Figure 28, where the RRC from Figure 24 is partitioned into two sub-components: the one on the left provides a 3GPP-compliant way for the RAN to interface to the Mobile Core’s control plane (the figure labels this sub-component as a “Proxy”), while the one on the right opens a new programmatic API for exerting software-based control over the pipeline that implements the RAN user plane.
To be more specific, the left sub-component simply forwards control packets between the Mobile Core and the PDCP, providing a path over which the Mobile Core can communicate with the UE for control purposes, whereas the right sub-component implements the core of the RRC’s control functionality (which as we explained in Section 4.1 is also known as RRM). This latter component is commonly referred to as the RAN Intelligent Controller (RIC) in O-RAN architecture documents, so we adopt this terminology. The “Near-Real Time” qualifier indicates the RIC is part of 10-100ms control loop implemented in the CU, as opposed to the ~1ms control loop required by the MAC scheduler running in the DU.
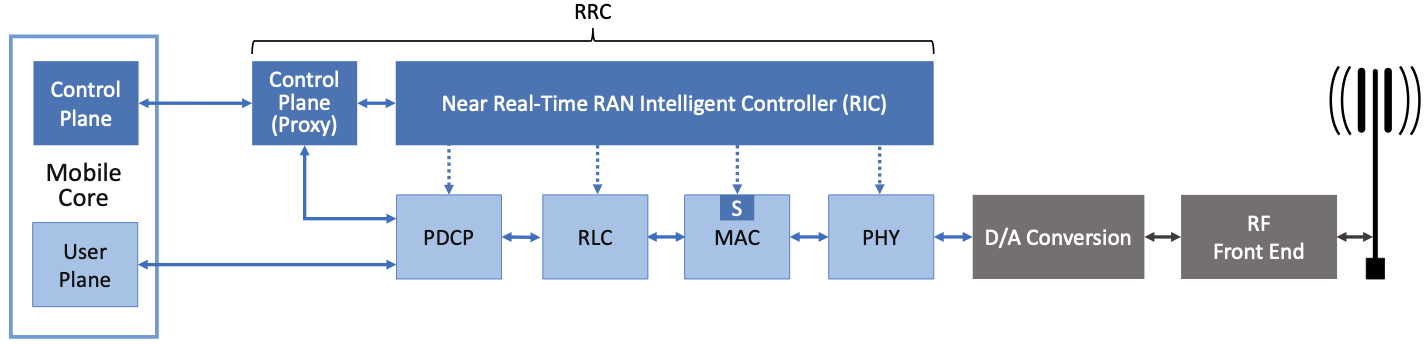
Figure 28. RRC disaggregated into a Mobile Core facing control plane component (a proxy) and a Near-Real-Time Controller.
Although not shown in Figure 28, keep in mind (from Figure 25) that the RRC and the PDCP form the CU. Reconciling these two figures is a little bit messy, but to a first approximation, the PDCP corresponds to the CU-UP and RRC-Proxy corresponds to the CU-CP, with the RIC “lifted out” and responsible for overseeing both. We postpone a diagram depicting this relationship until Section 4.5, where we summarize the end-to-end result. For now, the important takeaway is that the SDN-inspired refactoring of the RAN is free both to move functionality around and to introduce new module boundaries, as long as the original 3GPP-defined interfaces are preserved.
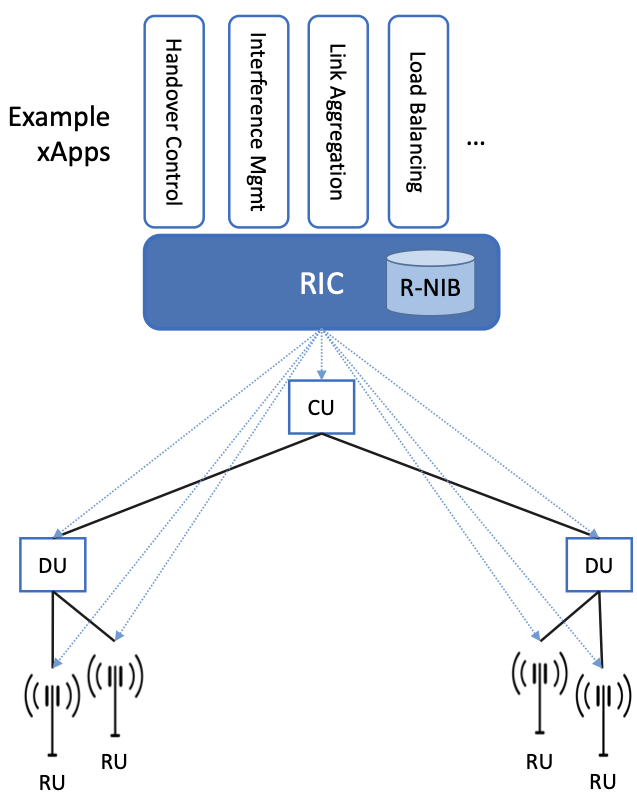
Figure 29. Example set of control applications (xApps) running on top of Near-Real-Time RAN Controller (RIC), controlling a distributed set of Split RAN elements (CU, DU, RU).
Completing the picture, Figure 29 shows the Near-RT RIC implemented as an SDN Controller hosting a set of SDN control apps. The RIC maintains a RAN Network Information Base (R-NIB)—a common set of information that can be consumed by numerous control apps. The R-NIB includes time-averaged CQI values and other per-session state (e.g., GTP tunnel IDs, 5QI values for the type of traffic), while the MAC (as part of the DU) maintains the instantaneous CQI values required by the real-time scheduler. More generally, the R-NIB includes the following state:
Fixed Nodes (RU/DU/CU Attributes)
Identifiers
Version
Config Report
RRM config
PHY resource usage
Mobile Nodes (UE Attributes)
Devices
Identifiers
Capability
Measurement Config
State (Active/Idle)
Links (Actual and Potential)
Identifiers
Link Type
Config/Bearer Parameters
5QI Value
Virtual Constructs (Slice Attributes)
Links
Bearers/Flows
Validity Period
Desired KPIs
MAC RRM Configuration
RRM Control Configuration
The four example Control Apps (xApps) in Figure 29 do not constitute an exhaustive list, but they do represent the sweet spot for SDN, with its emphasis on central control over distributed forwarding. These functions—Link Aggregation Control, Interference Management, Load Balancing, and Handover Control—are often implemented by individual base stations with only local visibility, but they have global consequences. The SDN approach is to collect the available input data centrally, make a globally optimal decision, and then push the respective control parameters back to the base stations for execution. Evidence using an analogous approach to optimize wide-area networks over many years (see, for example, B4) is compelling.
Further Reading
For an example of how SDN principles have been successfully applied to a production network, we recommend B4: Experience with a Globally-Deployed Software Defined WAN. ACM SIGCOMM, August 2013.
One way to characterize xApps is based on the current practice of controlling the mobile link at two different levels. At a fine-grained level, per-node and per-link control are conducted using the RRM functions that are distributed across the individual base stations.1 RRM functions include scheduling, handover control, link and carrier aggregation control, bearer control, and access control. At a coarse-grained level, regional mobile network optimization and configuration is conducted using Self-Organizing Network (SON) functions. These functions oversee neighbor lists, manage load balancing, optimize coverage and capacity, aim for network-wide interference mitigation, manage centrally configured parameters, and so on. As a consequence of these two levels of control, it is not uncommon to see reference to RRM Applications and SON Applications, respectively, in O-RAN documents for SD-RAN. For example, the Interference Management and Load Balancing xApps in Figure 29 are SON Applications, while the other two xApps are RRM Applications.
- 1
Pedantically, Radio Resource Management (RRM) is another name for the collection of control functionality typically implemented in the RRC stage of the RAN pipeline.
Keep in mind, however, that this characterization of xApps is based on past (pre-SDN) implementations of the RAN. This is helpful as the industry transitions to SD-RAN, but the situation is likely to change. SDN is transforming the RAN, so new ways of controlling the RAN—resulting in applications that do not fit neatly into the RRM vs SON dichotomy—can be expected to emerge over time.
4.4 Near Real-Time RIC
Drilling down to the next level of detail, Figure 30 shows an exemplar implementation of a RIC based on a retargeting of the Open Network OS (ONOS) for the SD-RAN use case. ONOS (described in our SDN book) was originally designed to support traditional wireline network switches using standard interfaces (OpenFlow, P4Runtime, etc.). For the SD-RAN use case, the ONOS-based RIC instead supports a set of RAN-specific north- and south-facing interfaces, but internally takes advantage of the same collection of subsystems (microservices) as in the wireline case.2
- 2
Technically, the O-RAN definition of the RIC refers to the combination of xApps and the underlying platform (in our case ONOS), but we emphasize the distinction between the two, in keeping with the SDN model of distinguishing between the Network OS and the suite of Control Apps that run on it.
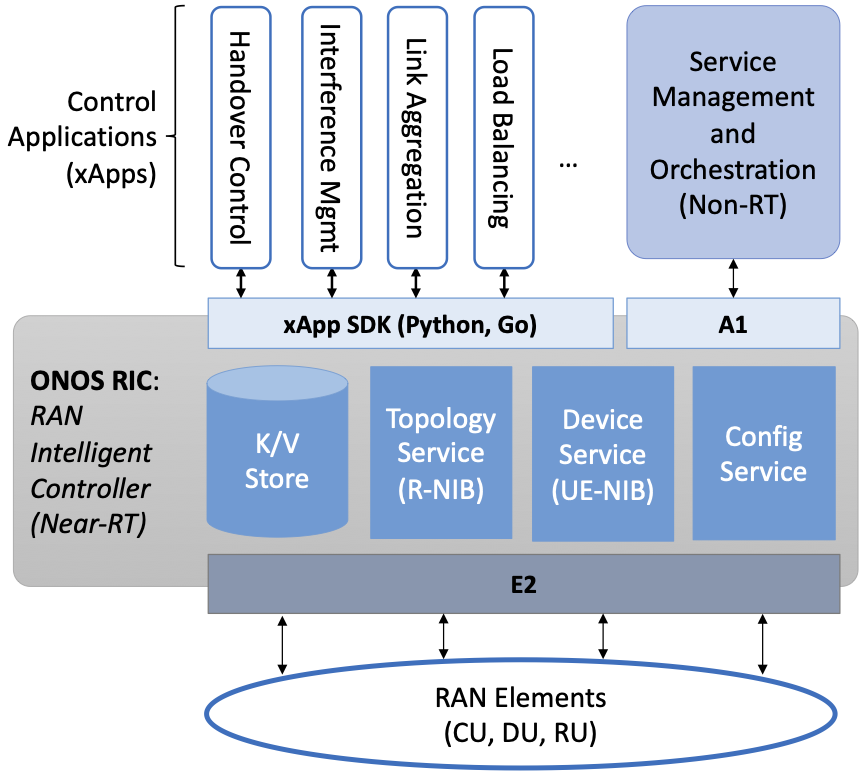
Figure 30. O-RAN compliant RAN Intelligent Controller (RIC) built by adapting and extending ONOS.
Specifically, the ONOS-based RIC includes a Topology Service to keep track of the fixed RAN infrastructure, a Device Service to track the UEs, and a Configuration Service to manage RAN-wide configuration state. All three of these services are implemented as Kubernetes-based microservices, and take advantage of a scalable key-value store.
Of the three interfaces called out in Figure 30, the A1 and E2 interfaces are based on pre-existing 3GPP standards. The third, xApp SDK, is specific to the ONOS-based implementation. The O-RAN Alliance is using it to drive towards a unified API (and corresponding SDK) for building RIC-agnostic xApps.
The A1 interface provides a means for the mobile operator’s management plane—typically called the OSS/BSS (Operations Support System / Business Support System) in the Telco world—to configure the RAN. We briefly introduced the OSS/BSS in Section 2.5, but all you need to know about it for our purposes is that such a component sits at the top of all Telco software stacks. It is the source of all configuration settings and business logic needed to operate a network. You can think of A1 as the RAN’s counterpart to gNMI/gNOI (gRPC Network Management Interface/gRPC Network Operations Interface), a pair of configuration APIs commonly used to configure commodity cloud hardware.
The Near-RT RIC uses the E2 interface to control the underlying RAN elements, including the CU, DUs, and RUs. A requirement of the E2 interface is that it be able to connect the Near-RT RIC to different types of RAN elements from different vendors. This range is reflected in the API, which revolves around a Service Model abstraction. The idea is that each RAN element advertises a Service Model, which effectively defines the set of RAN Functions the element is able to support. The RIC then issues a combination of the following four operations against this Service Model.
Report: RIC asks the element to report a function-specific value setting.
Insert: RIC instructs the element to activate a user plane function.
Control: RIC instructs the element to activate a control plane function.
Policy: RIC sets a policy parameter on one of the activated functions.
Of course, it is the RAN element, through its published Service Model, that defines the relevant set of functions that can be activated, the variables that can be reported, and policies that can be set. The O-RAN community is working on three vendor-agnostic Service Models. The first, called Key Performance Measurement (abbreviated E2SM-KPM), specifies the metrics that can be retrieved from RAN elements. The second, called RAN Control (abbreviated E2SM-RC), specifies parameters that can be set to control RAN elements. The third, called Cell Configuration and Control (abbreviated E2SM-CCC), exposes configuration parameters at the cell level.
In simple terms, E2SM-KPM defines what values can be read and E2SM-RC and E2SM-CCC defines what values can be written. Because the available values can be highly variable across all possible devices, we can expect different vendors will support only a subset of the entire collection. This will limit the “universality” the O-RAN was hoping to achieve in an effort to break vendor lock-in, but that outcome is familiar to network operators who have been dealing with divergent Management Information Bases (MIBs) since the earliest days of the Internet.
Finally, the xApp SDK, which is specific to the ONOS-based implementation, is currently little more than a “pass through” of the E2 interface. This implies the xApps are expected to be aware of the available Service Models. One of the challenges the SDK has to deal with is how data passed to/from the RAN elements is encoded. For historical reasons, the E2 interface uses ASN.1 formatting, whereas the ONOS-RIC internally uses gRPC and Protocol Buffers to communicate between the set of microservices. The south-bound E2 interface in Figure 30 translates between the two formats. The SDK currently makes the gRPC-based API available to xApps.
Further Reading
To learn more about the details of ONOS and its interfaces, we recommend the chapter in our SDN book that covers it in depth. Software-Defined Networks: A Systems Approach. Chapter 6: Network OS.
4.5 Control Loops
We conclude this description of RAN internals by revisiting the sequence of steps involved in disaggregation, which, as the previous three sections reveal, is being pursued in multiple tiers. In doing so, we tie up several loose ends, and focus attention on the resulting three control loops.
In the first tier of disaggregation, 3GPP defines multiple options for how the RAN can be split and distributed, with the pipeline shown in Figure 24 disaggregated into the independently operating CU, DU, and RU components shown in Figure 31. The O-RAN Alliance has selected specific disaggregation options from 3GPP and is developing open interfaces between these components.
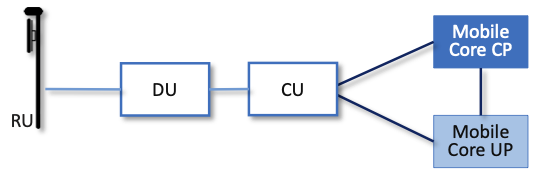
Figure 31. First tier of RAN disaggregation: Split RAN.
The second tier of disaggregation focuses on the control/user plane separation (CUPS) of the CU, resulting in the CU-UP and CU-CP shown in Figure 32. The control plane in question is the 3GPP control plane, where the CU-UP realizes a pipeline for user traffic and the CU-CP focuses on control message signaling between Mobile Core and the disaggregated RAN components (as well as to the UE).
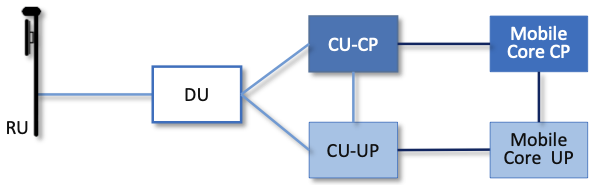
Figure 32. Second tier of RAN disaggregation: CUPS.
The third tier follows the SDN paradigm by separating most of RAN control (RRC functions) from the disaggregated RAN components, and logically centralizing them as applications running on an SDN Controller, which corresponds to the Near-RT RIC shown previously in Figures 28 and 29. This SDN-based disaggregation is repeated in Figure 33, which also shows the O-RAN-prescribed interfaces A1 and E2 introduced in the previous section. (Note that all the edges in Figures 31 and 32 correspond to 3GPP-defined interfaces, as identified in Section 4.2, but their details are outside the scope of this discussion.)
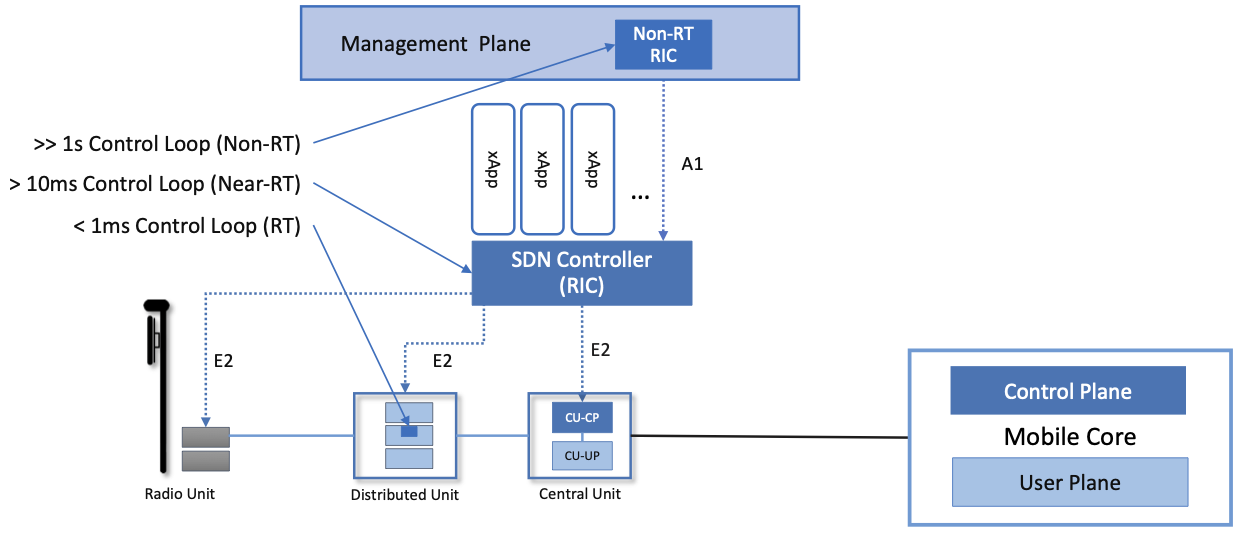
Figure 33. Third tier of RAN disaggregation: SDN.
Taken together, the A1 and E2 interfaces complete two of the three major control loops of the RAN: the outer (non-real-time) loop has the Non-RT RIC as its control point and the middle (near-real-time) loop has the Near-RT RIC as its control point. The third (innermost) control loop—shown in Figure 33 running inside the DU—includes the real-time Scheduler embedded in the MAC stage of the RAN pipeline. The two outer control loops have rough time bounds of >>1sec and >10ms, respectively. As we saw in Chapter 2, the real-time control loop is assumed to be <1ms.
This raises the question of how specific functionality is distributed between the Non-RT RIC, Near-RT RIC, and DU. Starting with the second pair (i.e., the two inner loops), it is the case that not all RRC functions can be centralized; some need to be implemented in the DU. The SDN-based disaggregation then focuses on those that can be centralized, with the Near-RT RIC supporting the RRC applications and the SON applications mentioned in Section 4.3.
Turning to the outer two control loops, the Near RT-RIC opens the possibility of introducing policy-based RAN control, whereby interrupts (exceptions) to operator-defined policies would signal the need for the outer loop to become involved. For example, one can imagine developing learning-based controls, where the inference engines for these controls would run as applications on the Near RT-RIC, and their non-real-time learning counterparts would run elsewhere. The Non-RT RIC would then interact with the Near-RT RIC to deliver relevant operator policies from the Management Plane to the Near RT-RIC over the A1 interface.